
Arbeiten am Laufroboter
Finn Buschmann und Holger Hujjon berichten von ihrer Arbeit an der Hochschule Mannheim
Die vermeintliche Krone der Schöpfung, der Mensch, bedient sich einer besonderen Fortbewegungsart: Dem Laufen auf zwei Beinen. Können fachkunkundige Personen einem von Hobbybastelnden gebauten Roboter diesen komplexen Bewegungsablauf näherbringen?
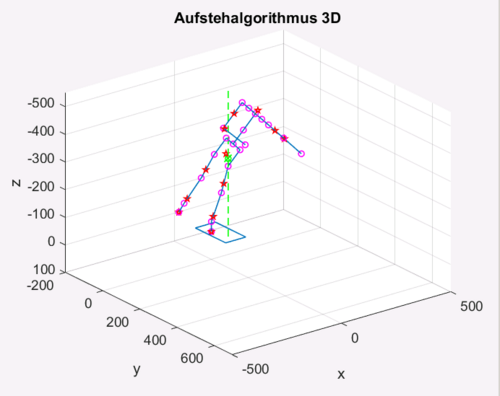
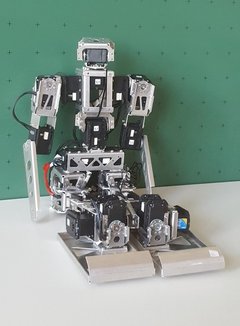
An der Hochschule Mannheim arbeiteten die beiden Hectorianer, betreut durch Prof. Dr. Ihme, am humanoiden Laufroboter "Elvis". Dieser verfügt über 15 Motoren und 12 Gelenke, ist 550 mm hoch und ca. 2,6 kg schwer. Er wurde in Handarbeit mit einer Auflage von einem Exemplar gefertigt. Zur Entwicklung von Bewegungsalgorithmen wurde hauptsächlich die Simulation mit Matlab verwendet. Dabei konnten die beiden Hectorianer an eine 2D-Grundlage anknüpfen, die Gruppen vor ihnen bereits erarbeitet hatten. Durch das Erweitern dieses Simulationsprogramms auf 3 Dimensionen wurde die Simulation asymmetrischer Bewegungsmuster und so die Simulation eines Laufalgorithmus ermöglicht.
Ein wesentlicher Bestandteil der Simulation ist die Schwerpunktberechnung und -anzeige. Denn wie beim Menschen auch ist das Aufstehen, Stehen und Gehen weniger ein Problem mangelnder Muskulatur, sondern eher der Koordination in Bezug auf die Gewichtsverlagerung. Dieser Programmteil funktioniert auf Basis der Schwerpunktgleichung (gewichtete Addition der Einzelschwerpunkte) und überprüft, ob der Schwerpunkt über dem/den sich am Boden befindlichen Fuß/Füßen befindet. Dementsprechend wird in einer Visualisierung der Schwerpunkt in grüner bzw. roter Farbe angezeigt.
Beim Aufstehen und Gehen ist der Ort des Schwerpunkts von großer Bedeutung: Während des Aufstehens muss der Roboter sich so lange mit den Händen abstützen, bis der Schwerpunkt sich über den Füßen befindet, erst dann kann er sich aufrichten. Beim Gehen (oder einbeinigen Stehen) muss der Schwerpunkt sich stets über dem "Standfuß" befinden, da sonst der Roboter seitlich kippt.
Elvis wurde mithilfe sogenannter Winkeltabellen (via USB) angesteuert: Ein ROS (Robot Operation System)-Programm ordnete jeder Spalte einen Motor zu, jede Zeile entsprach einem Zeitabschnitt bzw. Simulationsschritt. Die Einträge in dieser Tabelle gaben die absolute Rotation der Motoren im Gradmaß an. Die Winkeltabellen wurden mit LibreOffice Calc 4.2.8.2 bearbeitet und im CSV-Format gespeichert. Der Vorteil der Winkeltabelle bestand darin, dass sie sowohl in der Simulation als auch bei den realen Bewegungen von Elvis' als Eingabedatei dienen konnte.
Neben der wesentlichen Erweiterung der Simulation, auf der der Hauptfokus dieser Projektarbeit lag, wurde auch die Zuverlässigkeit des Aufstehalgorithmus durch simulations- und praxistestunterstütze Anpassung einiger Werte erhöht und ein Demo-Programm für asymmetrische Bewegungsabläufe entwickelt. Die Simulation ist auch auf andere Laufroboter ähnlicher Bauweise anwendbar, dafür müssten lediglich einige Parameter angepasst werden.